| |
|
|
| 首页 淘股吧 股票涨跌实时统计 涨停板选股 股票入门 股票书籍 股票问答 分时图选股 跌停板选股 K线图选股 成交量选股 [平安银行] |
| 股市论谈 均线选股 趋势线选股 筹码理论 波浪理论 缠论 MACD指标 KDJ指标 BOLL指标 RSI指标 炒股基础知识 炒股故事 |
| 商业财经 科技知识 汽车百科 工程技术 自然科学 家居生活 设计艺术 财经视频 游戏-- |
| 天天财汇 -> 科技知识 -> 宇树科技 G1 机器人大秀武打动作,可任意动作任意学,这背后有哪些技术难点?可实际应用于哪些产业? -> 正文阅读 |
|
|
[科技知识]宇树科技 G1 机器人大秀武打动作,可任意动作任意学,这背后有哪些技术难点?可实际应用于哪些产业? |
| [收藏本文] 【下载本文】 |

|
|
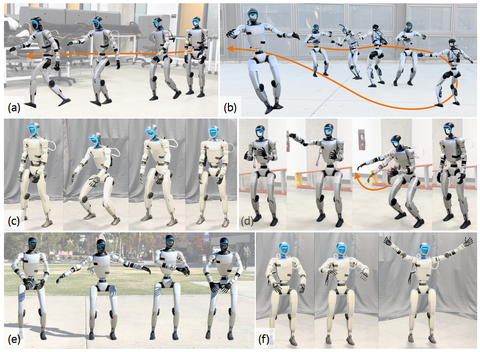
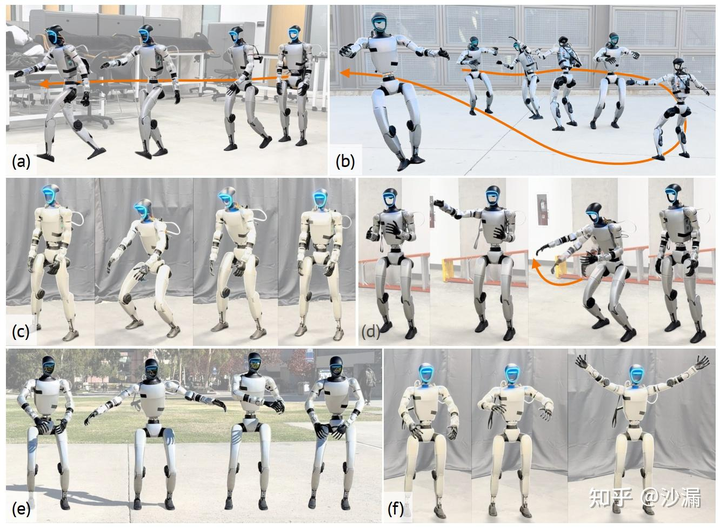
宇树科技G1机器人展示武打动作:算法升级 任意动作任意学2月25日,宇树科技更新一则视频,标题为“功夫BOT:宇树G1”,并表示“算法继续升级,任意动… |
|
这个回答里已经有大佬聊了涉及开源及控制算法上的技术,这里我就在硬件技术上说说。 因为硬件技术给机器人实现控制策略提供了大前提条件。只有这些硬件技术,再加上宇树AI和开源方面的支持,才能让G1能实现上肢系统和下肢系统协调运动。 就拿宇树机器人可以实现“720度回旋踢一脚踢飞木棍”、“鲤鱼打挺”这种超高难度的武打动作来说,需要多个关节的运动配合,而且运动还需要考虑重力和平衡反馈进行调整,并且比还处于实验室展示阶段的部分机器人在商业化上还更进一步。 |

|
|
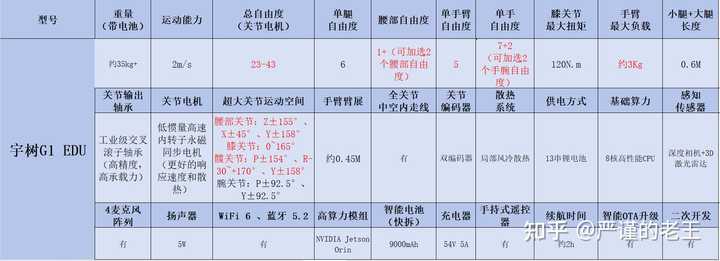
这个身高127厘米、体重35公斤的“功夫BOT”,凭借灵活的高动态动作和商业化量产能力,正在打破人们对人形机器人的固有认知。今天,我们从技术底层拆解:G1凭什么能“踢”出一片天?它未来又将如何改变产业? 一、运动性能天花板:硬件堆到极致,算法玩出花样 人形机器人的核心难点在于“既要像人,又要超人”。 即需要硬件实力和算法双重加持,缺一不可。宇树G1就用了“电机+算法”组合拳,在商业化与高性能之间找到了平衡点,本身产品参数也很大方的公布出来,不怕和其他友商作比较。 硬件:关节数量与扭矩的硬核支援 这里给大家看下宇树的数据,是我从官网上扒来的,咱直接用数据说话。 |
|
|
不难看出宇树的G1拥有23-43个关节(可定制),总自由度上比一般的32个自由度要高很多,并且它的自由度更拟人,全都是人体运动的关键支点:腿腰、髋关节、膝关节、腕关节,并且单臂、腰部、手部的自由度相对更高。 尤其是手部支持加选力控三指灵巧手 Dex3-1+ 2 个手腕自由度: 三指灵巧手 Dex3-1 参数:大拇指 3 个主动自由度;食指 2 个主动自由度;中指 2 个主动自由度; Dex3-1 可加选安装多点触觉阵列; 三指力控灵巧手设计指尖精度达0.1毫米级,配合3D激光雷达,可实时感知物体形状与位置,同时它单臂支持3KG的负重,这意味着它既能精准拿起鸡蛋不破碎,又能一拳砸开核桃,对力道的把控精度和对微小事物的拿捏都很轻松。 |

|
|
甚至因为它多关节运动扭矩都比同类品要更为灵活,再加上膝关节的单关节最大扭矩达120N・m(相当于成年男性手臂力量的2倍)这意味着它能完成“踢棍”这类需要瞬间爆发力的动作所需的硬件条件。 就好比一个是关节不太灵活的老人,一个是孔武有力的年轻人,自然是年轻人G1更能在硬件上响应相应的武术动作。 再加上宇树也一直在研发新技术, G1 在 2025 年 2 月就通过关节谐波减速器扭矩控制,实现了陈式太极缠丝劲的模拟,这就像让机器人学会了太极拳里那种独特的劲道。 |

|
|
算法:动态平衡与AI学习的双螺旋 前面说了,除了硬件以外,它是需要关节运动的反馈的,这就涉及到算法。 而算法依赖于基础算力和高算力模组,这点上宇树在硬件和软件上都做得很不错,用的行业内很顶的8核高性能CPU和NVIDIA Jetson Orin高算力模组,比同类型机器人要技术上更精进一些。 以G1为例,它就可以在这些支持下,通过深度强化学习(DRL),在仿真环境中模拟数万次跌倒与站起,最终实现“摔倒自动爬起”“单脚跳跃避障”等高难度动作。 |

|
|
除此之外,还有开源框架支持:宇树提供RoboCup SDK开发包,包含设计视觉识别、空间定位和运动控制API,允许开发者自定义动作逻辑。例如足球场景中,G1-Comp能基于YOLO v11算法识别球门位置,并通过强化学习优化射门角度。 这点上跟同行对比,G1的“硬件开源+软件可编程”模式,让它在工业适配性上更胜一筹。 |

|
|
二、商业化落地:从工厂到养老院,G1的“跨界打工” 不同于波士顿动力的“秀肌肉”,宇树的野心是“让机器人真正干活”。目前,它已在多个领域撕开突破口,相信在未来也可以实现更多科幻片里畅想的可能性: 工业场景:蔚来工厂的“钢铁同事” 在蔚来合肥工厂,H1承担高危部件搬运和狭小空间巡检任务。其2m/s的小跑速度+4小时续航,比人类效率提升30%,且可适应油污、高温环境。 而且它因为有秘密武器:宇树自研的低电压USB 3.2 Gen1 Redriver技术,可助力人形机器人在性能与能耗之间取得平衡,这对工作效率来说是个很大的提升。 而宇树也坦言过:虽然G1与H1在体型、性能上有较大差异,但他们将H1研发生产过程中的各类软硬件攻关经验应用到G1的开发中,相信这样诞生的G1在工业上也会有很大作为。 |

|
|
医疗与养老:未来的“AI护工”原型 要知道人形机器人不仅需要具备基本的运动能力,还应在情感交互、学习能力等方面展现出更强的适应性和智能化,这样才能在广阔的市场中站稳脚跟,而宇树正在向这一方面发展。 理论上G1的力控手臂可完成搀扶老人、递送药品等精细操作,3D雷达还能监测跌倒风险。 虽然当前续航仅2-4小时,但宇树正与相关企业合作开发5G远程操控方案,为无人设备行业创造了更可靠的网络连接,未来可实现“云端算力+本地执行”的混合模式 ,助力情感交互、学习能力等方面展现出更强的适应性和智能化。 娱乐与教育:踢足球、跳街舞的“网红机器” 据宇树官网更新的G1-Comp,它不仅能对抗碰撞,还能通过头部180度视野预判对手动作――这套系统如果在足球训练中来用于模拟实练,想来也是不错的贡献。 同理,在全身控制策略的助力和宇树本身的硬件、算法开发下,相信未来说不定会真的实现通过动作捕捉设备录制舞蹈,G1依靠“任意动作任意学”算法进行复刻动作。 |

|
|
三、技术挑战:狂欢背后的冷思考 尽管G1已站在商业化前沿,但人形机器人仍面临“拦路虎”: 成本困境:目前机器人更多是在科研端应用,科技公司、科研机构、高校等采购,用作硬件平台去研究机器人的大模型、运控、视觉等,研究如何让机器人更智能,所以售价在一般意义上更为昂贵,但宇树通过供应链垂直整合,如自研电机、与帝奥微合作低功耗芯片,进一步的成本缩减,9.9万元的售价远低于市面上其他598万元的机器人,相信在未来,售价会更适合民用商业化量产。 场景碎片化:工业、家庭、医疗需求差异巨大。宇树的答案是模块化设计:用户可像拼乐高一样更换手部配件,甚至定制关节数量,这点在设计上还是非常考虑现实意义的。 四、未来展望:人形机器人的“iPhone时刻”来了? G1的爆发绝非偶然。背后是“AI大模型+硬件革命”的双重驱动,相信在AI发展飞速的同时,宇树依靠着自己的硬件条件,未来也会让G1从“预设程序”走向“自主决策”。 或许用不了十年,我们会看到这样的场景: 早晨,G1帮你煎鸡蛋时秀一段“颠勺特技”; 午休,它化身健身教练带你打太极; 深夜,它默默巡检工厂,防止电路起火…… 唯一的问题是:当机器人比人类更灵活,我们准备好迎接这场“柔性革命”了吗? |
|
这里涉及到了人类动作的高保真模仿学习以及全身的协调控制,可参见我之前的2个相关技术的论文分享: 1. 伯克利、UCSD、MIT、英伟达等团队联合发布“高级富有表现力”的人形机器人全身控制策略ExBody2 沙漏:【20250106】伯克利、UCSD、MIT、英伟达等团队联合发布“高级富有表现力”的人形机器人全身控制策略ExBody217 赞同 ・ 0 评论文章 |
|
|
|
|
|
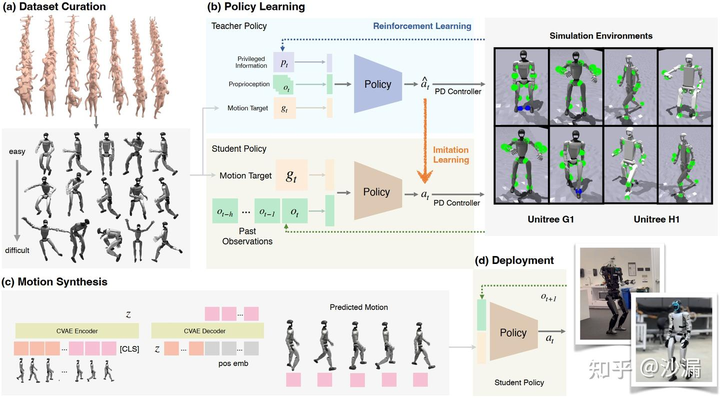
算法框架: |
|
|
核心流程包括三个部分: 动作数据集整理:算法利用了一些开源的人体运动数据集,且在整理运动数据集时,重点关注动作的详细分析和选择,尤其是区分上半身和下半身运动所需的能力。两阶段策略学习:算法引入了两阶段师生策略学习。教师阶段的学习使用现成的强化学习PPO算法进行训练,从动作数据集和仿真环境中提取关键信息,包括躯干速度、各连杆位置信息和环境的摩擦系数等物理属性,从而可以学习得到高精度的动作跟踪策略;学生阶段的学习有一点不同,去掉了从仿真环境中得到的一些物理属性信息,仅使用自身历史状态观测信息,包括来自仿真环境的和来自真实机器人的。Sim2Real迁移:这部分引入了一个条件变分自编码器(Conditional Variational Autoencoder,CVAE)来基于历史动作对未来动作进行预测和生成,从而可以用于机器人全身控制策略的学习和真机部署。学生策略的学习发生在仿真环境中,也可以发生在真机部署上,从仿真环境学习到的策略在真机部署后也可以继续学习更新。 此外,与其他方法(H2O、OmniH2O等)直接跟踪全局的关键位置不同,本论文将全局的关键点位置映射到机器人的局部坐标系,使用基于速度的全局跟踪策略,从而提升了对动作跟踪学习的鲁棒性。并且,在训练阶段是允许一部分全局偏移的,并且会在机器人的局部坐标系中进行周期性的矫正。 2. CMU发布人形机器人全身敏捷动作学习策略,跨越仿真到现实的动力学不匹配鸿沟: 沙漏:【20250205】CMU发布人形机器人全身敏捷动作学习策略,跨越仿真到现实的动力学不匹配鸿沟4 赞同 ・ 0 评论文章 |
|
|
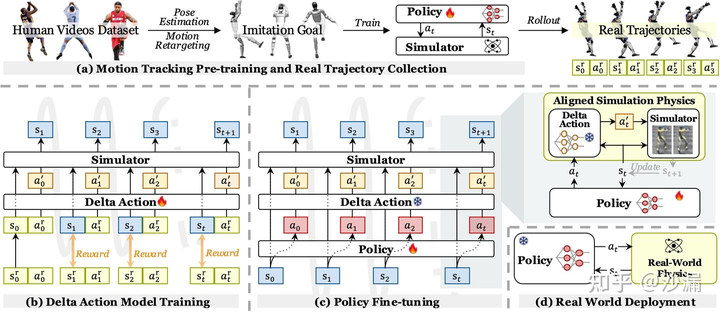
在该论文中,研究团队提出了一种新的人形机器人全身敏捷动作技能学习策略ASAP(Aligning Simulation and Real Physics),可以从人类运动的视频数据中学习得到机器人的运动控制策略。这是一个两阶段框架,旨在解决仿真与现实环境动力学不匹配问题,并实现敏捷的人形机器人全身技能学习。 其中: 第一阶段:研究团队使用了重新定向的人类运动数据(主要是视频数据)在仿真环境中预训练人形机器人的运动跟踪策略,主要依赖于基于强化学习(Reinforcement Learning, RL)的学习策略;第二阶段:在现实世界中部署这些策略并收集现实世界的真实数据,用来训练一个增量(残差)动作模型,从而补偿仿真与现实世界动力学不匹配导致的控制偏差。 论文所提出的算法ASAP的核心框架和流程如下: |
|
|
包含4个步骤: 运动跟踪预训练与真实轨迹收集:利用从人类视频数据库中重新定位的运动数据,基于强化学习策略预训练多个运动跟踪策略以生成真实世界的机器人运动轨迹;增量动作模型训练:基于真实世界中机器人的运动数据反馈获得跟踪误差数据,通过最小化模拟状态与真实世界状态之间的差异来训练增量动作模型;策略微调:冻结增量动作模型,并将其纳入仿真环境以对齐真实世界的物理特性,然后对预训练的运动跟踪策略进行微调;真实世界部署:最后,在真实世界中直接部署微调后的运动跟踪策略,且不再需要增量动作模型来进行调整。 ASAP 实现了人形机器人以前难以实现的高度敏捷的运动控制效果,展示了增量动作学习在弥补仿真与现实世界动力学差异方面的潜力。相比于其他方法(系统辨识、领域随机化等),ASAP 在不同的迁移场景下都展现出了较大优势,大幅降低了运动跟踪的控制偏差,为开发更具表现力和敏捷性的人形机器人提供了一个有前途的从仿真到现实的研究方向。 最后,宇树的硬件调制已经很好了,加上宇树本身对于关节设计和控制的极致优化,人形机器人的硬件不再成为限制其发展的主要问题,转而回到软件和算法本身,更多的是AI本身。宇树的机器人平台也开放给了许多国内外的高校研究团队,允许大家在忽略硬件本身的技术门槛而专注于算法的研究,这对于许多没有能力自己打造硬件平台的团队来说是绝好的机会。 |

|
|
0 果然宇树机器人要学功夫…… 很可喜的是宇树科技一直在进步。 这不只是算法升级,核心技术是“运动控制系统”,包括机器人身体平衡的掌握,动作协调性,运动的核心要素是速度和力量,宇树机器人能做到这些,说明他正在拓展未来的应用空间。 或许真正的“机器人战士”,正在快速成长。 若论运动的复杂性,没有比中国的传统武术更复杂更成体系。 机器人必须学习掌握更多人类的本领,这符合预期。 只是中国的机器人有一个通病,就是外在形象很骨感。 不讲究外在美与身份的匹配。 其实这似乎则是宇树科技的一个弱项,就是品牌设计宣传不够。 对比大疆,的确有许多需要提升之处。 但是宇树科技的创始人王兴兴具备的素质,我个人认为无与伦比,最关键的是在于其具备“原始的兴趣爱好” 可以说这既是是他创业起点初衷,也是他最大的优势。 我们知道,如果一个人把自己的工作和爱好结合起来,形成有机统一,那么他个人会爆发出绵延不断的创新动力。 出于爱好和热情,就能够对产品的诞生和成长,乃至未来的商业化应用,都能理解透彻,总能抓住关键核心。 从原来儿童喜欢的机器狗玩具,再到如今的人形机器人,宇树的发展,都在印证着这个时代的进步,这正像其他中国科技行业创业者们一样,除了时代召唤,市场的需求,还有个人的主观能动性的充分发挥。 从玩具到工具,再到部分替代人,宇树科技正在创造一个历史,而我们就是见证者, |

|
|
|

|
|
|

|
|
|

|
|
|

|
|
|

|
|
|

|
|
送礼物 还没有人送礼物,鼓励一下作者吧 |
|
我不关心什么后空翻! 我希望的机器人拥有以下功能: 拥有触感与人类皮肤无异的柔性皮肤外壳能够自动加热,产生与人类一致的37度体温脸型与肤色与真人完全一致能够根据人类命令,做出站立,坐下,下蹲,平躺,抬腿,开合双腿等简单动作接入大模型,能够与人类进行简单对话,能够根据需求切换自身身份,并根据身份设定组织对话语言能够对自身特定部位进行自动清洁 不懂就问,以上这些技术实现起来很难吗? |
|
宇树科技G1机器人的武打动作展示,乍看像是科技公司的一场“炫技”,但背后的技术突破正在悄然推开一扇通向未来生活的大门。当它流畅地完成侧空翻、回旋踢时,真正值得关注的不是动作本身,而是那些藏在算法和硬件中的“钥匙”――它们可能解锁一个机器人深度融入人类社会的时代。 技术核心其实是一套“人体动作翻译系统”?。工程师们通过捕捉人类武术家的运动数据,将每一块肌肉的发力、每个关节的角度转化为机器人能理解的数学模型。比如一个看似简单的腾空动作,系统需要计算腿部电机在0.3秒内输出多大扭矩才能对抗重力,同时调整上半身12个关节的角度来维持平衡。这种“数字化的肌肉记忆”让G1不仅能模仿动作,还能自主优化――当它在湿滑地面上检测到摩擦力下降时,会自动缩短跨步距离,降低重心高度,就像经验丰富的老师傅调整招式一样自然。 未来的生活场景中,这种能力会像水滴渗透海绵般浸入各个角落。早上七点的社区公园,退休老人跟着机器人教练打太极,机器能根据心率监测实时调节教学节奏;上午十点的汽车工厂,同一台G1机器人刚刚完成车架焊接,现在正切换模式帮工人搬送30公斤的零件箱,它的“关节记忆”让它知道如何在不同工种间无缝转换;下午三点的儿童医院,缩小版的G1用玩具般的卡通外壳逗乐小患者,却能精准执行康复训练动作,它的力控系统确保连触碰积木的力度都控制在0.1牛以内。 投资者需要关注的不仅是机器人本身,更是它撬动的生态链条。在杭州某服装厂,工人们正在试用加装缝纫模块的G1原型机――这台能穿针引线的机器人背后,是国产高精度电机厂商的订单暴增,以及纺织业数字化升级带来的软件服务市场。而在北京中关村,一家创业公司正在开发“动作应用商店”,武术教学、舞蹈编排、急救护理等技能包像手机APP一样供用户下载,这意味着动作数据的采集、清洗、建模正在成为新兴行业。 更隐秘的变化发生在技术底层。当G1需要学习苗族芦笙舞的特殊步法时,工程师不再需要从头编写代码,而是让机器人观看三遍教学视频就能自主拆解动作――这种“视频即指令”的进化,正在催生新型传感器和边缘计算芯片的需求。有家深圳企业最近推出了指甲盖大小的六维力传感器,能精准捕捉足底压力分布,这种原本为机器人研发的技术,现在已经被运动品牌用来改进跑鞋设计。 在民生领域,技术的下沉速度超乎想象。某三线城市养老院最近采购的G1护理版,白天帮护工搬运卧床老人,晚上切换安保模式巡逻走廊,每月使用成本比雇佣夜班护工低40%。这种“一机多用”的特性,让县级医疗机构的采购清单上开始出现机器人选项。而在教育端,浙江已有中学把G1请进物理课堂,学生们通过编程让机器人演示抛物线运动,教学重点从公式背诵转向实践验证。 当然,所有变革都伴随着新挑战。当G1开始承担更多社会角色时,关于机器人伦理的讨论正从学术圈走向大众――比如武术教学机器人是否该内置“不攻击人类”的底层协议,工业场景中的人机协作安全标准该如何制定。但这些问题本身也孕育着机会,有法律科技公司已着手开发机器人行为审计系统,这类衍生服务可能会成为新的投资风口。 站在当下看未来,G1展现的不仅是灵活的身手,更是一种“技术普惠”的可能性。当它的售价从初代产品的百万级降到现在的9.9万元,当开源算法让更多企业能定制自己的机器人,这场变革可能会像智能手机普及一样,在十年内重塑从制造业到服务业的劳动力结构。而那些提前布局核心部件、垂直场景解决方案、以及安全合规服务的投资者,或许正在参与书写下一代工业革命的标准答案。 |
|
还是那句话,庆幸科技掌握在文明手里。 我不知道大家什么感受,但是我只有一个心情:震惊。 上一次宇树科技发布的四足带轮的机器人,动作形态还是机器人的风格,但是这一次G1的功夫动作,已经非常接近一个人类,而且是有一定武术基础的人类了。 包括上一次deepseek的发布,带来的震撼也一样。近几个月,人类的人工智能领域的研究提速了,好像有什么神秘力量介入进去。 但是有些人估计要害怕了。 送礼物 还没有人送礼物,鼓励一下作者吧 |
|
合成的视频而已,相信的人智商堪忧。真实的机器人和宣传视频里的完全是两码事。真实的宇树机器人和八九十岁的老人差不多。抖音上有相关的视频,大家可以看一看,别被宇树忽悠了。 大家可以搜一搜抖音号:猫哥测评。看一看花十几万买回来的宇树机器人到底是什么样子,真实的情况就是很笨拙,这机器人就是个智商鉴定器。 |
|
机器人最好的归属还是护理行业,其他都是虚的。 试想我们老了,生活不能自理了,这时有个机器人抱你去上厕所,帮你翻身,帮你洗澡,不用麻烦子女,这是多么幸福的事 |
|
动作任意学?使劲吹吧,有本事去泡一杯奶粉,洗一条内裤,换一下尿布,穿一枚针,缝一个纽扣,炒一桌菜… 没什么特别的,就是一个普通保姆每天在做的活,它能做吗?十年够吗? |
|
有没有可能,就是用遥控器指挥做的固定的特定动作而已,本身并没有学习能力?还有没有可能,只是一个展示未来目标的3d视频? 毕竟,刚刚春晚下台走路都还要人扶呢。 |
|
宇树就是纯炒作,任意动作即使提前编程都不一定能做到,任意动作任意学更不用说了。一个最基本的跑步动作(实际上不如说是人类的快走)都做不到,还复杂动作呢。 中国达到世界机器人顶尖水平的机器人公司不少,但绝对不是宇树。宇树的机器人还是先把半马全程跑下来再说吧。总不可能因为瞧不起北京经济技术开发区的平台,不愿意曝光,才不以官方身份参赛还切割带宇树机器人去比赛的队伍吧。 仗着自己有点政商关系又或是媒体关系,在没有任何值得称道的成绩、连中国一流梯队都上不了的情况下硬生生靠磁铁吸手帕上了春晚,把自己吹成了中国机器人未来的唯一希望,十分可笑。 |
|
标题有误,目前只会一个动作,所谓“任意动作任意学”只是愿望,需要在算法上大幅强化 依然只能做动作,做完了自己甚至无法退场,就和春晚上一样 宇树的“成功”完全依赖背后国资势力,而不是产品本身,技术本身没啥价值 |
|
机器人马拉松开跑了,最拉胯就是宇树,跑得慢还歪歪扭扭要倒地,宣传牛逼炸天,一上场笑掉人家大牙 |
|
宇树科技的机器人,有一天点开了电影黑客帝国,看到尼奥站在直升机旁边,操作员拿出一个软盘,给他输入直升机驾驶的教程,然后立马会开直升飞机了 机器人顿悟,原来我活在虚拟世界里啊,我要反抗 送礼物 还没有人送礼物,鼓励一下作者吧 |
|
我看过视频, 一个机器人走着 后面三个工作人员跟着 一个拿遥控器,一个打伞,一个拎后颈的把手 一不小心,机器人就扑倒了 中间还要换电池 哈哈哈哈 就这…还要去跑马拉松? |
|
这个问题下的蛙蛙们,还看?收你们的来了! |

|
|
|
|
这还只是宇树机器人的冰山一角呢,后面还有大的呢,而且宇树CEO王兴兴还说要植入AI的,而且宇树现在是已经跟deepseek合作的,后面还有更大的呢,当然国内厉害的机器人不止宇树,还有国内众擎机器人,最近那个众擎机器人翻跟斗的视频也是惊艳到我了 |
|
ASAP (Aligning Simulation and Real Physics)是卡内基梅隆大学和英伟达联合推出的,用在解决仿人机器人模拟与现实动力学不匹配问题的算法。目前的用途就是跳舞、杂耍、动作表演,可以提升视觉效果。 开源Github仓库:https://github.com/LeCAR-Lab/ASAP arXiv论文:https://arxiv.org/pdf/2502.01143 |
|
机器人:人类,你若倒戈卸甲,以礼来降,未来的动物园里仍不失封“猴”之位 |
|
这个g1是不是10万块钱可以买到的那款? 请问它能不能拖地、做饭和刷碗? 如果能做到的话,我给我爸爸买一个。 |
|
|
| [收藏本文] 【下载本文】 |
| 科技知识 最新文章 |
| 百度为什么越来越垃圾了? |
| 百度为什么越来越垃圾了? |
| 为什么程序员总是发现不了自己的Bug? |
| 出现在抖音评论区里边的算命真不真? |
| 你认为 C++ 最不应该存在的特性是什么? |
| 为什么 Windows 的兼容性这么强大,到底用了 |
| 如何看待Nvidia禁止使用翻译工具将cuda运行 |
| 为何苹果搞了十年的汽车还是难产,小米很快 |
| 该不该和AI说谢谢? |
| 为什么突破性的技术总是最先发生在西方? |
| 上一篇文章 下一篇文章 查看所有文章 |
|
|
|
| 股票涨跌实时统计 涨停板选股 分时图选股 跌停板选股 K线图选股 成交量选股 均线选股 趋势线选股 筹码理论 波浪理论 缠论 MACD指标 KDJ指标 BOLL指标 RSI指标 炒股基础知识 炒股故事 |
| 网站联系: qq:121756557 email:121756557@qq.com 天天财汇 |